L2F Demonstration
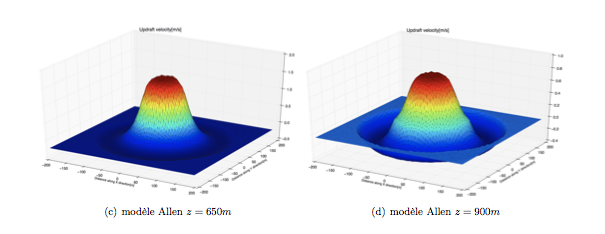
In order to fly, a fixed wing drone needs to use thermals so that he can gain energy and altitude. That is why we had to implement this phenomenon inside L2F to get a realistic flight mechanics for our fixed wing drone. There are many mathematical models for thermals available in the scientific literature. We can, for example, use the Allen model like represented on the graph bellow.
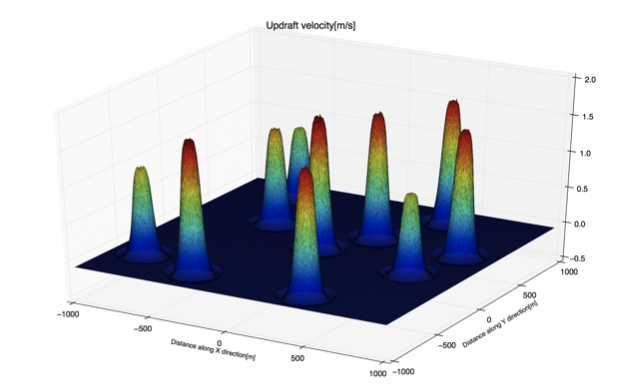
After choosing the thermals’ model, we implement them in a flight zone. This allows us to represent realistic flight conditions for the drone. With thermals in place, we will be able to represent the trajectory of our drone piloted by a really simplistic algorithm.
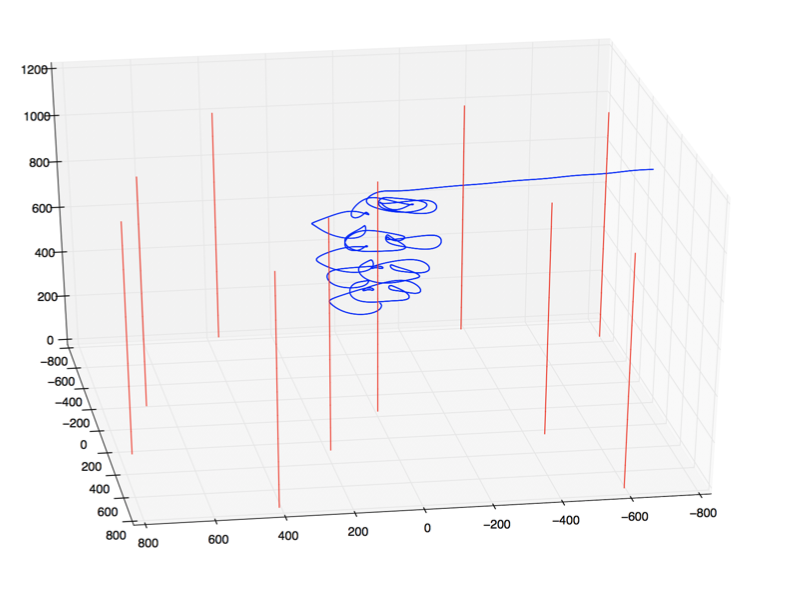
With the thermals represented above, we obtain the trajectory bellow. The pilot we coded was really simplistic, the command he had was to turn left as soon has he detects a thermal. We see that the fixed wing drone doesn’t have any trouble to detect the thermal but since this pilot is not a machine learning algorithm he ends his course on the ground